Un contenitore per note, idee e progetti di
Filippo Carboni.
Questo è un contenitore per tenere traccia del mio percorso di crescita. Ci saranno progetti IT su GitHub, spunti di riflessione e note da libri letti, aggiornamenti sui progressi nel campo della crescita personale.
Tesina esposta all’esame di Maturità presso il LiceoScientifico Statale Talete.
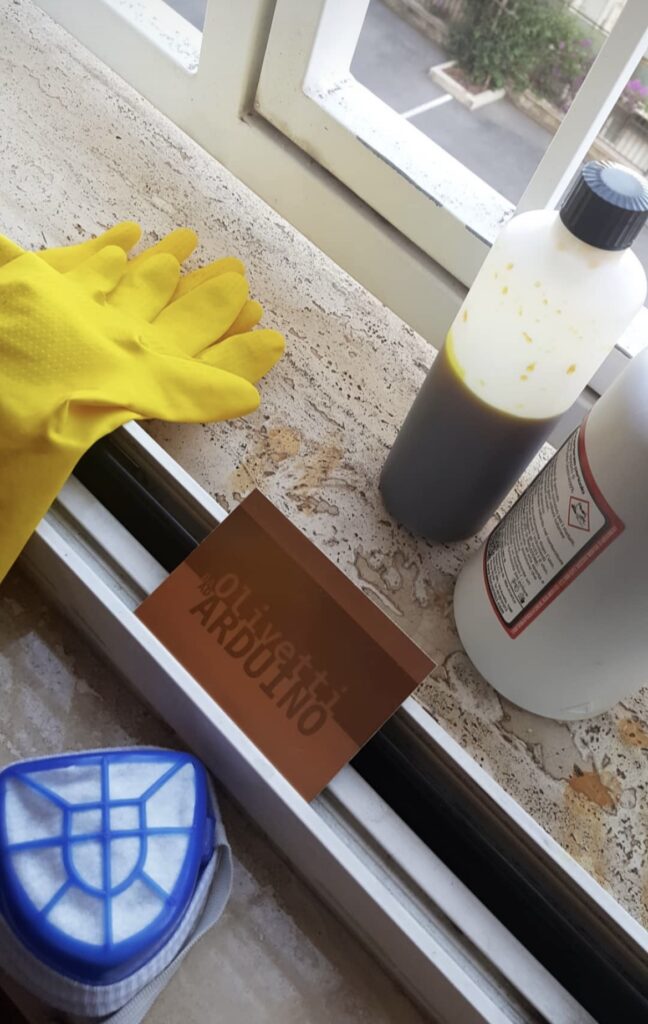
Di aggiunta al progetto ho realizzato un bromografo DIY recuperando un vecchio scanner da un tipo che lo regalava su Subito.it
Ho installato 4 lampade ultraviolette all’interno dello scanner, collegando un Arduino Uno e un relè pilotato tramite Bluetooth dall’app android realizzata ad hoc.
Per l’esposizione ho inciso su una basetta il logo della tesina, di seguito qualche foto che ho recuperato dall’archivio del processo.
Allego la presentazione che ho realizzato per accompagnare l’esposizione della tesina.
L’idea di questo progetto nasce da un’esigenza reale riscontrata sul lavoro.
In particolare il servizio in questione richiede agli utenti di inserire le foto della propria patente e un selfie. I dati raccolti devono poi essere analizzati da una persona che prenderà la decisione di confermarli registrando i dati di interesse:
Tipo di patente
Scadenza
o scarterà le immagini poiché non attinenti, non leggibili o per non corrispondenza tra documento, selfie e/o dati anagrafici precedentemente inseriti.
Obiettivo del progetto
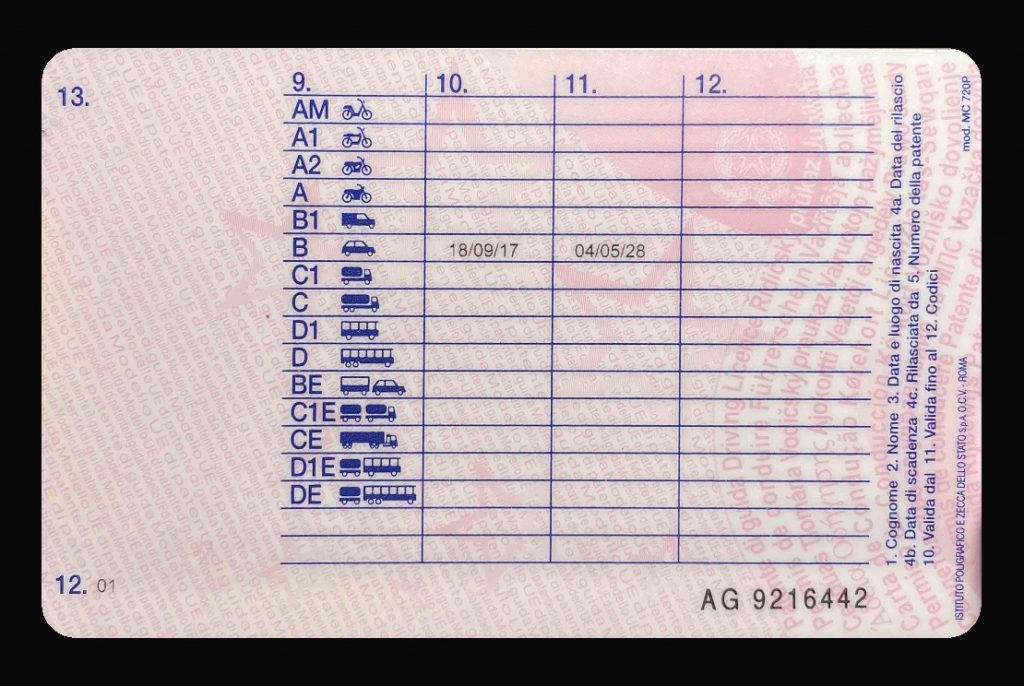
Il programma in oggetto prende in input 3 immagini:
Foto del fronte della patente
Foto del retro della patente
Selfie dell’utente (possibilmente con patente in mano)
Come anticipato l’obiettivo finale è quello di realizzare un programma che sia in grado di agevolare, e a tendere sostituire, il lavoro di analisi della validità del documento e di raccolta delle informazioni.
Al fine di affrontare la sfida in modo ordinato ho suddiviso il problema in step più semplici di seguito elencati e successivamente descritti:
Preprocessing delle immagini in input
Face match tra selfie e documento con stima del match
1. Preprocessing delle imagini in input
In questa fase lo scopo è quello di prendere in input le foto di fronte e retro del documento così come il cliente del servizio le ha caricate. Sebbene sarebbe auspicabile avere già delle immagini chiaramente leggibili e di facile lettura, nella realtà dei fatti ci troviamo di fronte a immagini che sono spesso ruotate, distorte in prospettiva o incorniciate dall’ambiente di cui, per le finalità che ho descritto, ci interessa poco e niente.
Una volta caricato l’input cerchiamo di riportare le immagini in un output standard che incornici chiaramente il documento, ruotandolo correttamente e riportandolo, per quanto possibile, nella prospettiva corretta.
Un esempio del risultato atteso è il seguente:
Immagine in inputRisultato atteso
La scelta implementativa su cui ho puntato per affrontare questo primo passo è stata quella di affidarmi all’omografia.
L’idea è quella di sfruttare gli elementi grafici che si ripetono su tutte le patenti Italiane o europee per andare a identificare le corrispondenze tra i punti rilevati sull’immagine in input e quelli rilevati su un’immagine precedentemente disposta come template per il confronto.
Sull’immagine del template sono state rimosse eventuali informazioni poco significative e sono stati lasciati gli elementi che maggiormente si ripetono sui file in input.
Per trattare i passi successivi risulta più semplice accompagnare la descrizione con il codice, in particolare vedremo codice Python, gli algoritmi e le librerie utilizzate possono per essere riprodotte con altri linguaggi, ad esempio C++.
Importiamo le librerie che ci serviranno nel progetto.
import os
import cv2
import numpy as np
import face_recognition # To match faces
import shutil # To delete folder
Definisco una lista di nomi di cartelle da cui caricare i file in input.
In ogni cartella mi aspetto che ci siano i seguenti file:
doc_fronte.jpeg
doc_retro.jpeg
doc_selfie.jpeg
A partire da INPUT_SET eseguiamo un ciclo su ogni elemento.
Prima di iniziare l’esecuzione dello script utilizzo la libreria shutil per rimuovere la cartella di output “/results” e tutto il suo contenuto. ignore_errors deve essere settato a True per ignorare gli errori che il sistema manda nel tentativo di rimuovere una cartella non vuota.
shutil.rmtree('results', ignore_errors=True)
Inizio il ciclo, per ogni cartella di input ne creo, se non esiste, una di output con lo stesso nome:
for user in INPUT_SET:
# Folder name
folder_name = str(user)+"/"
# create target folder if not exists
saving_url = "results/"+folder_name
if not os.path.exists(saving_url):
os.makedirs(saving_url)
Il prossimo passaggio è quello di chiamare la funzione get_wrapped_image, la quale preso in input il percorso dove trovare un immagine restituisce l’elaborazione della stessa estrapolando solo i dati di interesse che racchiudono il documento in un’immagine.
Utilizzo la libreria opencv per caricare la risorsa grafica del template e la risorsa di input da confrontare.
Il template è disponibile nella cartella “/template” anche come file .PSD per generare eventuali altri template. Il template preso in esame è per documenti europei e in particolare italiani. Una successiva implementazione potrebbe performare una classificazione per paesi di appartenenza per poi applicare il template corretto.
Front templateBack template
Caricata l’immagine in input procediamo con il resize dell’immagine e l’aggiunta di un bordo all’immagine (che può aiutare nei casi di foto molto ravvicinate e incomplete del documento), poi procediamo con la conversione dell’immagine in scala di grigi.
Ci avvaliamo quindi delle seguenti 2 funzioni ausiliarie.
# Resize test picture
test = original_test = resize_with_aspect_ratio_and_add_border(original_test, height=None)
# Convert picture to gray scale color palette
test = rgb_to_gray_scale(test)
La conversione in scala di grigi permette alla libreria di trovare i keypoint nell’immagine. Ho deciso di utilizzare per comodità il metodo cvtColor di opencv piuttosto che implementare l’algoritmo di conversione.
Di seguito la definizione della funzione di ridimensionamento. Il colore dello sfondo del padding attorno all’immagine è deciso dalla costante:
BACKGROUND_COLOR = (10, 10, 10)
def resize_with_aspect_ratio_and_add_border(image, width=None, height=None, inter=cv2.INTER_AREA):
dim = None
(h, w) = image.shape[:2]
if width is None and height is None:
return image
if width is None:
r = height / float(h)
dim = (int(w * r), height)
else:
r = width / float(w)
dim = (width, int(h * r))
resized_img = cv2.resize(image, dim, interpolation=inter)
# Create an empty black_img and centering the resized
w = dim[0] + PADDING_PIXELS * 2
h = dim[1] + PADDING_PIXELS * 2
blank_image = np.zeros((h, w, 3), np.uint8)
for y in range(h):
for x in range(w):
x2 = x - PADDING_PIXELS
y2 = y - PADDING_PIXELS
if x2 < 0 or x2 >= dim[0]:
x2 = None
if y2 < 0 or y2 >= dim[1]:
y2 = None
if x2 is None or y2 is None:
rgb_pixel = BACKGROUND_COLOR
else:
rgb_pixel = resized_img[y2 - 1][x2 - 1]
blank_image[y, x] = rgb_pixel
return blank_image
Per effettuare il ridimensionamento utilizzo il metodo resize di OpenCV mantenendo l’aspect ratio dell’immagine.
Procedendo con la funzione get_wrapped_image, il passaggio successivo è trarre i keypoints dalle singole immagini convertite in scala di grigi. MAX_FEATURES definisce il numero massimo di keypoint da trovare sull’immagine.
Eseguo il metodo di rilevazione dei match tra i keypoint rilevati sul template e quelli rilevati sull’immagine di test.
Ordino poi i match in base alla distanza, tronco l’array in modo da tenere la percentuale GOOD_MATCH_PERCENT come asset di valori validi.
# FEATURES MATCHING
# Chose the matcher
matcher = cv2.DescriptorMatcher_create(cv2.DESCRIPTOR_MATCHER_BRUTEFORCE_HAMMING)
# Make the match
matches = matcher.match(descriptors1, descriptors2, None)
matches = list(matches)
# FIRST ALGORYTHM
# Sort matches by score
matches.sort(key=lambda x: x.distance, reverse=False)
# Calculate how many matches to keep
numGoodMatches = int(len(matches) * GOOD_MATCH_PERCENT)
matches = matches[:numGoodMatches] # Remove not so good matches
Applico un ulteriore filtro per eliminare i match con distanza eccessiva, ovvero maggiore di MAX_KEYPOINT_DISTANCE.
newMatches = list()
for match in matches:
if (match.distance > MAX_KEYPOINT_DISTANCE):
break
# print("Distance:", match.distance)
newMatches.append(match)
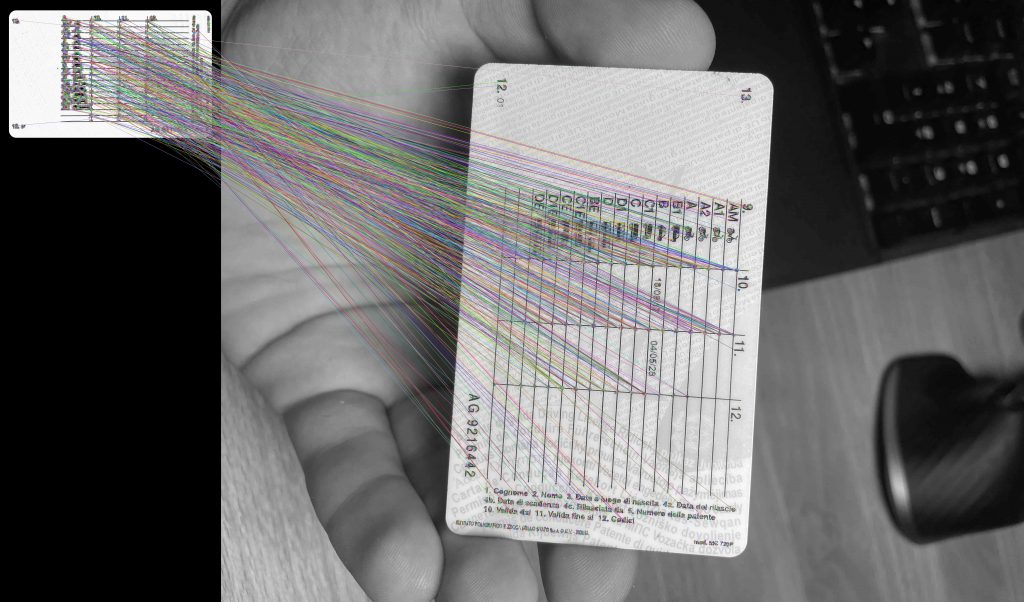
Eseguo quindi il codice per effettuare effettivamente la trasformazione dell’immagine:
Visualizzazione grafica dei match tra test e template
# Save the matching image for debug
imMatches = cv2.drawMatches(template, keypoints1, test, keypoints2, newMatches, None)
saving_url = "results/"+filename+"_matching.jpg"
cv2.imwrite(saving_url, imMatches)
template = cv2.drawKeypoints(template, keypoints1, None)
test = cv2.drawKeypoints(test, keypoints2, None)
# Extract location of good matches
points1 = np.zeros((len(matches), 2), dtype=np.float32)
points2 = np.zeros((len(matches), 2), dtype=np.float32)
for i, match in enumerate(matches):
points1[i, :] = keypoints2[match.trainIdx].pt
points2[i, :] = keypoints1[match.queryIdx].pt
# Find homography
h, mask = cv2.findHomography(points1, points2, cv2.RANSAC)
# Use homography
height, width, channels = template.shape
im2Reg = cv2.warpPerspective(original_test, h, (width, height))
Applico una maschera all’immagine trasformata per eliminare lo sfondo indesiderato, il colore dello sfondo è sempre dato da BACKGROUND_COLOR. Ritorno poi l’immagine elaborata.
# Loading Mask
mask = cv2.imread("template/mask.png") # Load the template picture
mask = rgb_to_gray_scale(mask)
# Applying Mask Template pixel per pixel
(h, w) = im2Reg.shape[:2]
for y in range(h):
for x in range(w):
v = mask[y - 1][x - 1]
if v < 200:
im2Reg[y - 1][x - 1] = BACKGROUND_COLOR
saving_url = "./results/" + filename + ".jpg"
return im2Reg
Tornando al ciclo principale
# WRAP DOCUMENT PICTURES
# Generate Wrapped Front image
front = get_wrapped_image(filename=folder_name+"doc_fronte", template="template/template-empty-front.png")
# Generate Wrapped Back Image
back = get_wrapped_image(filename=folder_name+"doc_retro", template="template/template-empty-back.png")
Elaborati fronte e retro inizio a preparare l’immagine per l’esportazione unendo verticalmente le immagini di fronte e retro elaborate.
# PREPARE FIRST PART OF OUTPUT IMAGE
# Stacking vertically the 2 pictures
collage = np.vstack((front, back))
# Standardize the image to match the collage heigth
collage = resize_with_aspect_ratio_and_add_border(collage, height=MAX_PICTURE_HEIGHT)
Voglio unire anche il selfie al “collage” finale. Prima di unirlo orizzontalmente chiamo la funzione rotate_selfie per ruotarlo in modo che il volto, se presente, si trovi nell’orientazione corretta.
# Rotate selfie picture detecting face
def rotate_selfie(selfie):
# Function performs selfie rotation until a face is found, then break and return the turned picture
for i in range(1, 5):
# Convert selfie in gray scale
selfie_gray = rgb_to_gray_scale(selfie)
# Looking for a face in the picture
selfie_faces = FACE_CASCADE.detectMultiScale(selfie_gray, 1.35, 8)
# Draw rectangle around the faces
# Check if at least one face was found
if len(selfie_faces):
break
selfie = cv2.rotate(selfie, cv2.ROTATE_90_CLOCKWISE)
# INTEGRARE IL SISTEMA DI ROTAZIONE IN CASO DI NESSUN VOLTO TROVATO
return selfie
Per ruotarlo mi avvalgo di un modello pre allenato di face detection, in pratica ciclo 4 volte ruotando alla fine di ogni iterazione l’immagine di 90 gradi in senso orario finchè non rilevo un volto, questo poichè il modello allenato è in grado di rilevare i volti solo se la linea che unisce gli occhi è pressocchè parallela al terreno.
In caso di nessun matching al momento non viene rilanciato un errore ma il programma procede comunque lasciando l’immagine con l’orientazione originale.
I parametri all’interno del metodo detectMultiScale sono settati empiricamente in modo da avere una veloce analisi dei volti nell’immagine, cercando comunque di non riconoscere come volti artefatti che non lo sono.
Proseguendo sempre sul programma originale:
# PREPARE SELFIE
# Loading Selfie and rotate it
selfie = cv2.imread("data/"+folder_name+"doc_selfie.jpeg")
selfie = rotate_selfie(selfie)
# Resize the image
selfie = resize_with_aspect_ratio_and_add_border(selfie, height=MAX_PICTURE_HEIGHT)
# Stacking collage with the selfie horizontally
collage = np.hstack((collage, selfie))
Esporto le tre immagini front, back e selfie nella cartella di output.
# Save selfie picture
selfie_url = saving_url+"selfie.jpeg"
cv2.imwrite(selfie_url, selfie)
# Save front picture
front_url = saving_url+"front.jpeg"
cv2.imwrite(front_url, front)
# Save back picture
back_url = saving_url+"back.jpeg"
cv2.imwrite(back_url, back)
Match tra foto del documento e selfie
Ora non resta che affrontare un controllo tra immagine sul documento e immagine sul selfie per verificare se i volti contenuti appartengono alla stessa persona.
# Make the match
is_a_match = match_faces(selfie_url, front_url)
Utilizzo match_faces per effettuare un controllo sul match dei volti, in caso in cui non vengano rilevati volti su una delle 2 immagini la funzione restituisce False, altrimenti True se c’è un match o False se non dovesse esserci.
# Match faces
def match_faces(selfie_url, front_url):
# Load images
selfie_image = face_recognition.load_image_file(selfie_url)
front_doc_image = face_recognition.load_image_file(front_url)
# Encode face elements detected on images
selfie_encoding = face_recognition.face_encodings(selfie_image)
front_doc_encoding = face_recognition.face_encodings(front_doc_image)
# If at least a face in each image is detected, matching proff is made
if len(selfie_encoding) and len(front_doc_encoding):
front_doc_encoding = front_doc_encoding[0]
selfie_encoding = selfie_encoding[0]
results = face_recognition.compare_faces([selfie_encoding], front_doc_encoding)
return results
# If at least a face is not detected return False
return [False]
Viene utilizzata la libreria face_recognition che ha come dipendenze CMake e DLib.
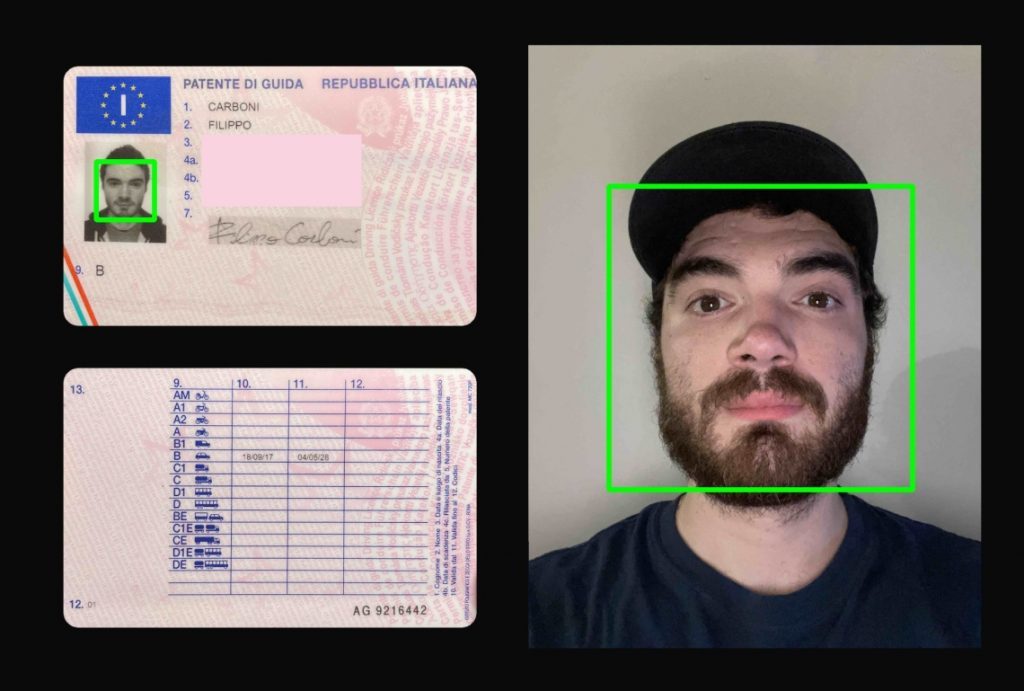
Rendo visibile in output il risultato: in particolare voglio disegnare dei rettangoli attorno ai volti rilevati nel collage di documenti e selfie, il colore del rettangolo viene scelto in base al risultato del match. Se i volti matchano il colore sarà verde, rosso altrimenti.
Infine esporto anche il file del collage.
# Set color based on matching result
rectangle_color = (0, 255, 0) if is_a_match[0] else (0, 0, 255) # (B,G,R)
# Detect faces
faces = FACE_CASCADE.detectMultiScale(gray, 1.3, 8)
# Convert into grayscale
gray = rgb_to_gray_scale(collage)
# Draw rectangle around the faces
for (x, y, w, h) in faces:
cv2.rectangle(collage, (x, y), (x + w, y + h), rectangle_color, 8)
# save output image
cv2.imwrite(saving_url+"collage.jpg", resize_with_aspect_ratio_and_add_border(collage, width=1080))
Risultato finale del collage
Possibili integrazioni future:
Addestrare un classificatore che riconosca la tipologia di documento per carica i template corretti. Valutare in alternativa un sistema di confronto tra template e fronte con algoritmo di valutazione della qualità dei match con ciascun template.
Rotazione su lato che presenta maggior numero di volti o valutare diversa strategia, esempio detection degli occhi e valutazione dell’orientazione della linea degli occhi (possibile problema di capovolgimento verticale).
OCR su tipo di patente ed eventualmente su data di scadenza.
JOINtheBRICKS è un semplice gioco one-tap che non è mai stato rilasciato al pubblico e che vorrei prima o poi pubblicare rimettendoci mano.
Integrava in maniera più completa rispetto al precedente Flappy Bird le API di Google Play Games includendo oltre alla classifica anche tutta la gestione degli obiettivi intermedi.
Scheda dello store.
Sono presenti 2 modalità di gioco, Arcade e Random. Lo scopo del gioco è quello di premere sullo schermo nel momento in cui le 2 barrette ai lati dello schermo si trovano in corrispondenza per almeno una parte ciascuno.
A seconda della modalità e del punteggio corrente cambierà la velocità e la dimensione delle stesse.
L’app è stata realizzata in Java su Android Studio. La grafica l’ho realizzata sempre in Photoshop.
Flappy Pope nasce nel 2014 nella prima versione (Icona dorata) viene poi rilasciata nella versione speciale Giubileo nel 2016, con un design rinnovato e nuove funzionalità.
Un’applicazione mobile ri dedicata al Giubileo, ispirata a Flappy Bird. L’app è ancora visibile sul PlayStore, purtroppo non più aggiornata e quindi non più compatibile con le API attuali di Google. Visibile qui: https://play.google.com/store/apps/details?id=com.filopixel.flappypope
Vista dello store
L’app vanta più di 100 download e 24 recensioni da 5 stelle [parenti e amici inclusi:)].
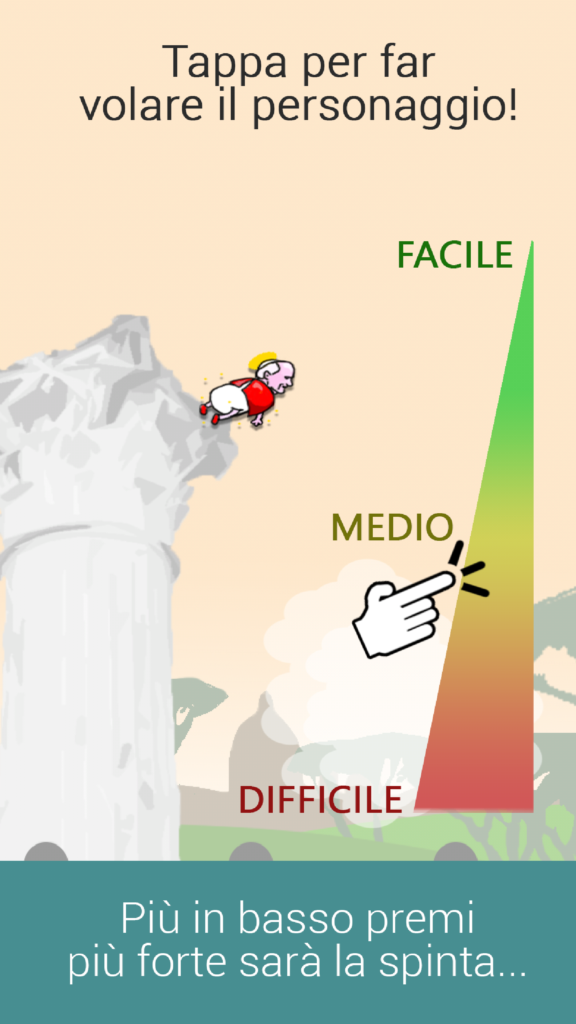
Le grafiche e l’interfaccia, visibili di seguito, sono state interamente disegnate da me [e si vede! 😉] su Photoshop.
Ho integrato la classifica tramite API di Google Play Games.
Gli scenari sono 4 diversi, i personaggi 3: Papa Benedetto XVI, Giovanni XXIII, Giovanni Paolo II. Oltre allo sfondo era possibile cambiare anche il tipo di colonne e il terreno, decorazioni tipiche del centro storico di Roma.
Il gioco prevedeva anche l’assegnazione di monete per sbloccare nuove grafiche.
L’input sul touch screen permette al papa di muoversi contro la forza di gravità per attraversare le colonne senza collidere.